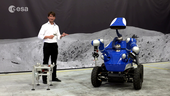
André Schiele, head of ESA’s Telerobotics and Haptics Laboratory and Associate of the Delft Robotics Institute introduces the robot rover key to his new experiment in his own words.
This is the Interact Centaur rover that ESA astronaut Andreas Mogensen will be operating from orbit aboard the International Space Station, to drive into position and then perform an operation requiring sub-millimetre precision.
Developed by ESA’s Telerobotics and Haptics Laboratory, the Interact Centaur is a 4×4 wheeled rover combining a camera head on a neck system, a pair of highly advanced force sensitive robotic arms designed for remote force-feedback-based operation and a number of proximity and localisation sensors.
As demonstrated here, Andreas will first attempt to guide the robot to locate an ‘operations task board’ and then to remove and plug a metal pin into it, which has a very tight mechanical fit and tolerance of only about 150 micrometres, less than a sixth of a millimetre.
As currently scheduled, Monday 7 September should see the Interact rover driven around the grounds of ESA’s ESTEC technical centre in Noordwijk, the Netherlands, from the extremely remote location of Earth orbit, 400 km up.
Signals between the crew and the robot must travel a total distance of approximately ninety thousand kilometres, via a satellite constellation located in geostationary orbit. Despite this distance, Andreas will exactly feel what the robot does on the surface – with only a very slight lag.